 百木园
百木园1 介绍
1、区域生长使用欧式距离判断像素差异
2、区分树叶使用GLI(gli = (2 * g - r - b) / (2 * g + r + b))
3、区分阴影使用亮度值
4、如果周围像素小于1个是叶子或阴影,只要周围有4个像素都属于区域,那么这个像素也属于区域
5、如果有5个像素都属于区域,那么这个像素也属于区域
2 源代码
https://github.com/zouxlin3/RoadExtract
3 使用方法
3.1 导入图片
from RoadRegionGrow import RoadImg # 从源代码下载RoadRegionGrow.py和Point.py
import matplotlib.pyplot as plt
import numpy as np
roadimg = RoadImg(\'test_pic.png\') # 输入图片路径
plt.imshow(roadimg.img)

图片来源(http://www.zhongkezhihang.com/html/news/579.html#lg=1&slide=2)
3.2 选取种子点
选取种子点[400, 600]和[300,1000](x、y值和图片上是相反的)
seeds = [[400, 600], [300,1000]]
roadimg.add_seeds(seeds)
3.3 确定区分树木和阴影的阈值
1、绘制gli的直方图
roadimg.gli_hist()
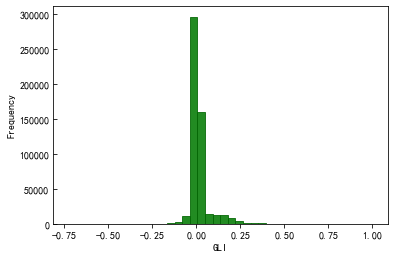
选取gli阈值为0.01
2、绘制亮度值的直方图
roadimg.lightness_hist()
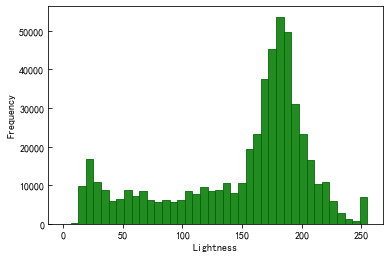
选取亮度值阈值为140.0
3.4 区域生长
label = [255, 0, 0]
em_threshold = 9 # 阈值可以根据多次试验确定,不同的图片不一样
g_thershold = 0.01
l_thershold = 140.0
transparency = 0.5
roadimg.region_grow(label, em_threshold, g_thershold, l_thershold)
plt.imshow(roadimg.add_mask(transparency))

plt.imshow(np.uint8(roadimg.region))

for i in range(6): # 进行多次遗漏检测
roadimg.leak_detect(label, g_thershold, l_thershold)
plt.imshow(roadimg.add_mask(transparency))

plt.imshow(np.uint8(roadimg.region))

4 本文最新版本
来源:https://www.cnblogs.com/zouxlin3/p/14805446.html
图文来源于网络,如有侵权请联系删除。