 百木园
百木园
交互的本质即交互对象间通过输入和输出的方式进行的信息交换,这里我们专指产品与用户(人)间的交互。
不同的产品与人的交互方式也不同,手机上的APP应用多是以图像交互(GUI)为主,现在家庭中的智能音箱主要是以语音交互(VUI)为主。移动机器人交互则既包含了图像交互、语音交互,同时也包含了手势交互、环境交互等多种方式。
一、人与人之间的交互
在搞懂移动机器人是怎么交互前,我们先了解下我们人与人、人与环境间是怎么交互的:
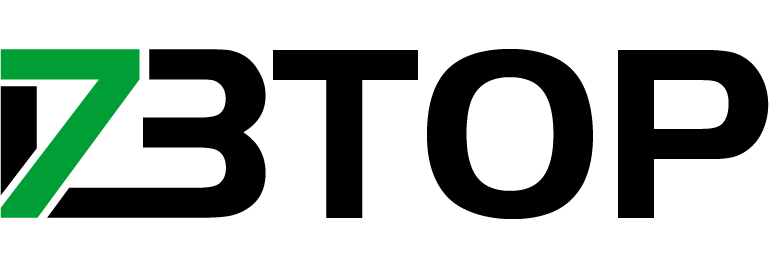
人体对外界的接触渠道(输入)主要分为:视觉、听觉、肤觉、嗅觉、味觉、前庭觉、运动觉。下面分别是格里格和津巴多共同撰写的《心理学与生活》一书中对人类感觉系统的描述以及不同感觉功能的阈限。
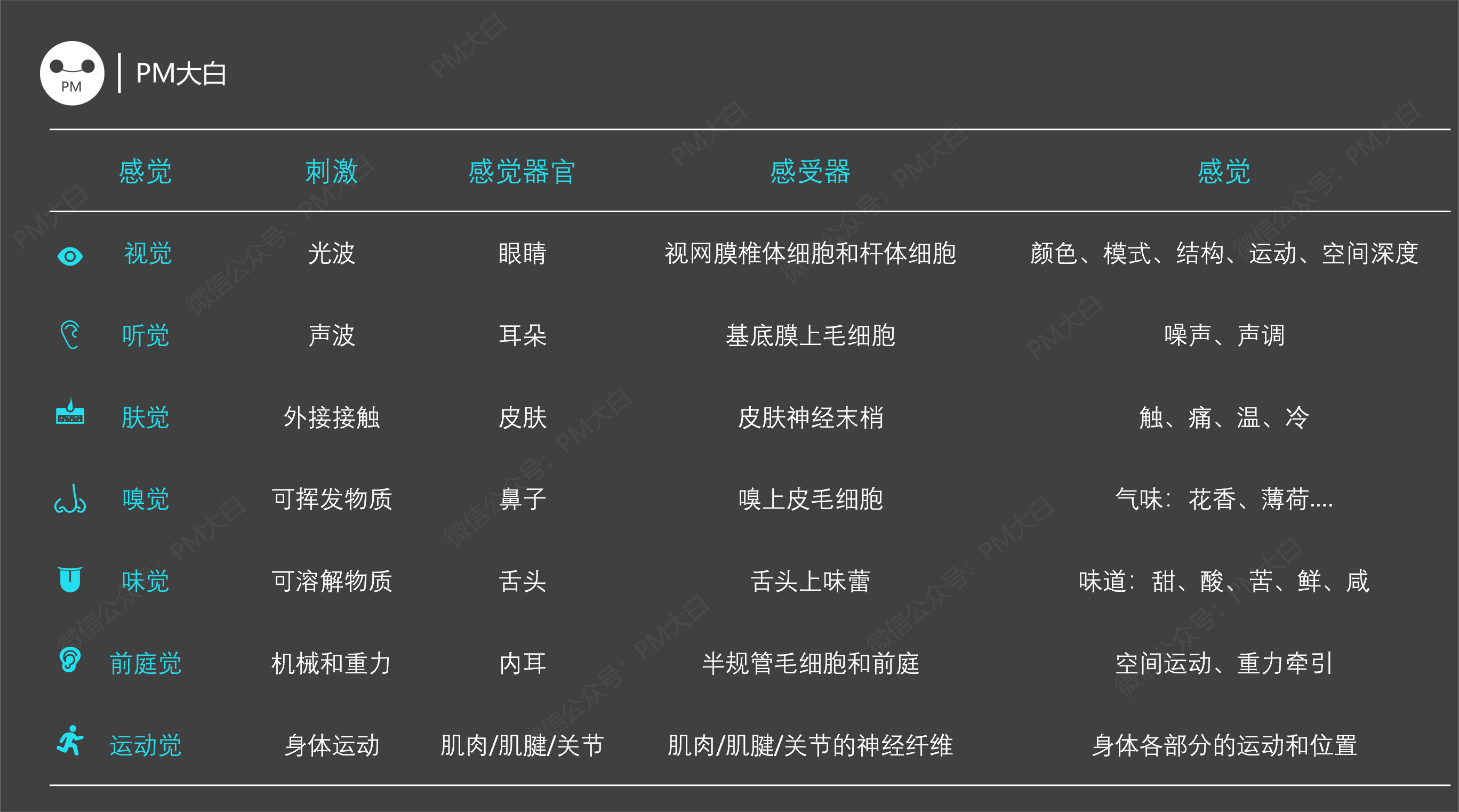
图1:人的感觉通道
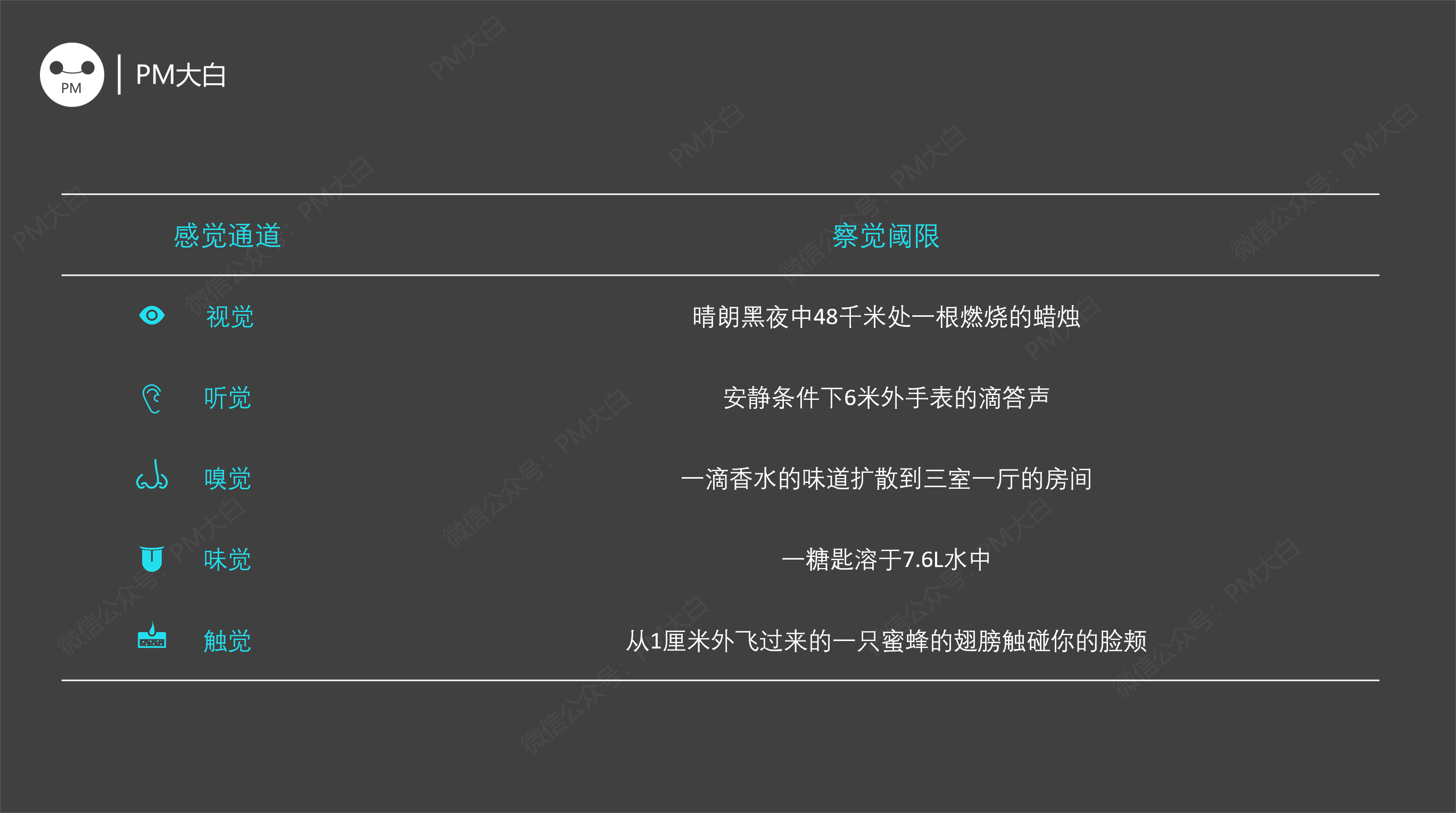
图2:人的感觉阈值
人与人的交往中,在不知不觉中均会通过以上感觉通道输入对人对事对周边环境的认识,通过大脑的判断和决策,然后通过口、肌肉、语音、移动的方式输出,从而对人对事对环境做出相应的反馈。
下面我们通过实例看看老中医是如何与倒霉的产品经理进行交互的(【…】表示输入通道;[…]表示输出通道)。
老中医和产品经理的故事:
二、人与机器人的交互
以上内容描述了真实环境下人与人、人与环境之间在不知不觉中通过视觉、听觉、嗅觉、触觉等通道获取信息,然后通过口(语音)以及肌肉(移动)等方式输出反馈的过程。
接下来我们再看看大白机器人是如何与倒霉的产品经理主人进行交互的(【…】表示输入通道;[…]表示输出通道)。
产品经理和大白机器人的故事:
虽然当前机器人还无法做到与真人一样进行交互,但是方向是明确的,拟人的设计,类比的推导与人相似的输入和输出通道:
图3:机器人的感觉/执行通道
三、软件界面交互设计
以上内容我们将真实人的交互与机器人的交互进行了类比,考虑到看到此文的肯定很多是互联网产品经理同仁,大多是设计APP、WEB等应用出身,我们在此取其中一点“功能设计需要考虑的因素”与机器人功能设计进行再一次类比,在设计APP等应用时免不了撰写大量的业务逻辑以及页面信息的展示和操作按钮的交互逻辑。
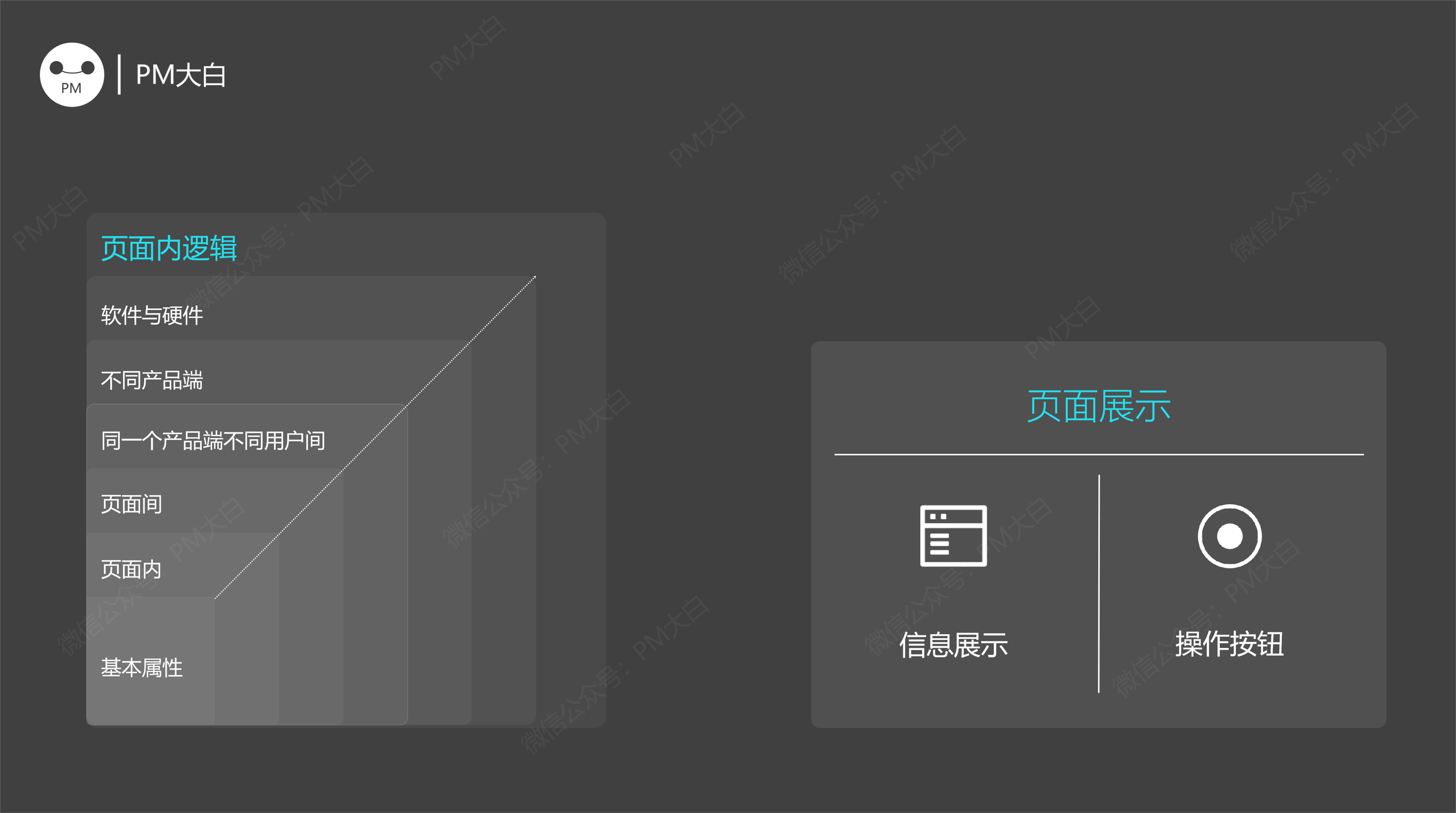
图4:页面设计
软件产品中可视页面的逻辑中主要包含:页面信息的展示、页面操作按钮的显示和操作,产品经理在撰写功能需求文档时很难穷尽所有的逻辑,但是可以尽可能去查漏补缺。具体到一个页面中的信息展示和操作,均会受到各个方面的影响,导致最终呈现在用户面前不同的页面效果,从影响距离和范围的维度来分析,一个功能或信息的展示和操作主要可以通过以下几个层次来梳理。
1)基本属性
信息或操作按钮的基本信息的展示。
信息:类型(图文、语音、视频…);加载刷新方式;分页规则;字体大小行间距等样式。
操作:操作前、操作中、操作后的按钮样式变化、按钮文字变化。
2)页面内
页面内其他信息或操作的变化导致当前目标项的呈现和操作逻辑。
3)页面间
页面间其他信息或操作的变化导致当前目标项的呈现和操作逻辑。
4)用户间
同一个产品端不同用户间的操作变化导致当前目标项的呈现和操作逻辑。
5)不同产品端
不同产品端(同一个产品线)信息或嘈杂的变化导致当前目标项的呈现和操作逻辑。
6)软件与硬件
软件均是基于一种硬件框架下运行的,硬件功能或架构的变化也会导致当前目标项的呈现和操作逻辑。
四、机器人(硬件)交互设计
单纯的软件应用(非底层操作系统)产品必须基于第三方的硬件进行运行,与硬件周边所处的物理或其他环境基本很少交互,硬件产品则不同,硬件产品的组成可能涉及到传感器、软件、算法、芯片、执行器,与硬件产生交互的方式可能也不仅仅局限于软件界面上的图像交互(GUI),还有语音交互(VUI),手势交互。
具体到硬件产品的一个功能逻辑梳理时考虑的因素也在再局限软件层面的页面与页面间、端到端的关系影响,同时还会考虑硬件周边的物理环境,与交互对象间的空间关系,以及不同时间段不同交互体验的考量,下图简要描述了机器人产品的一个组成和工作原理。
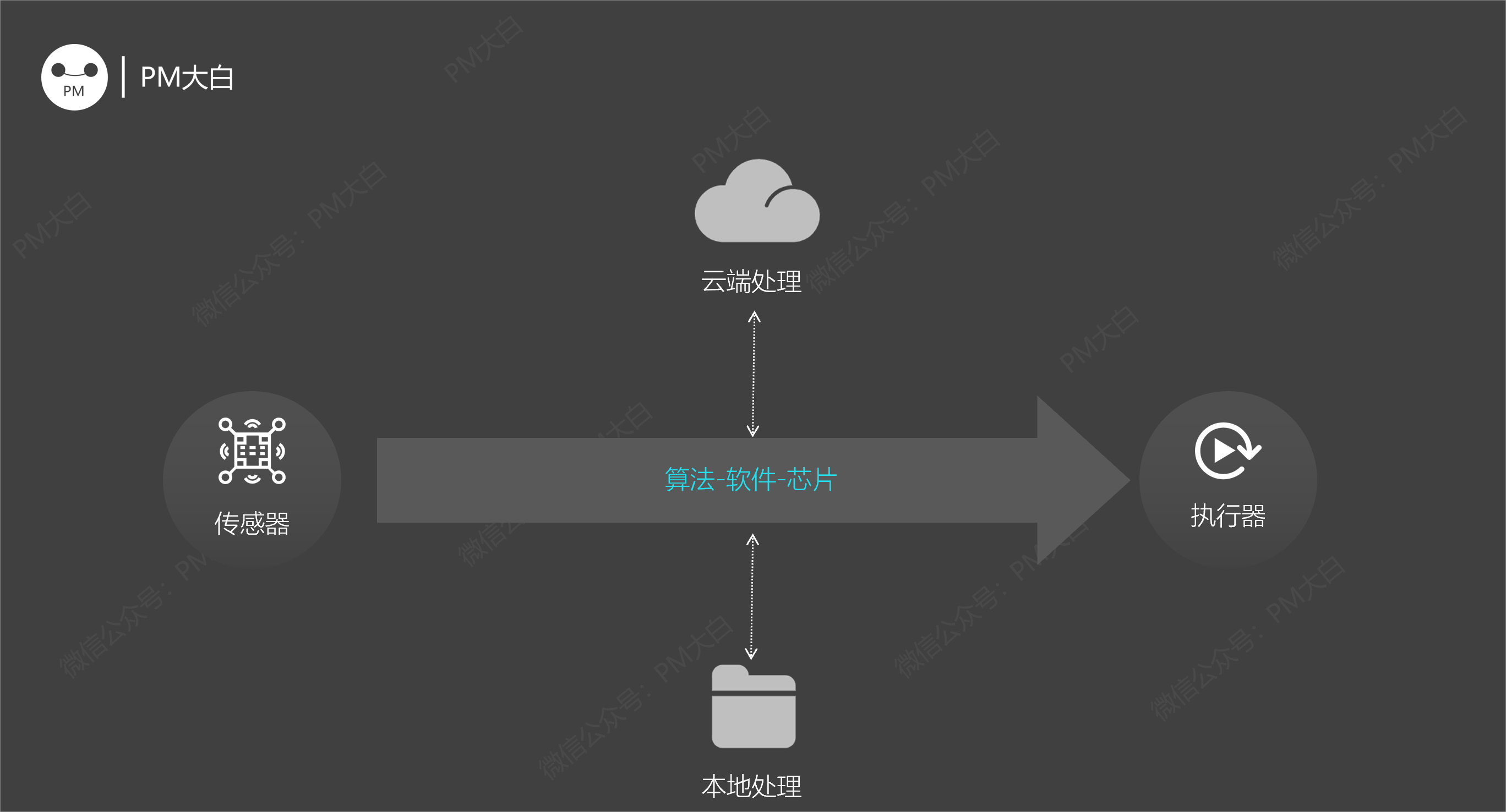
图5:机器人产品组成
回到机器人交互上,文章开篇已经提及交互的本质是信息的交互,呈现的方式则为信息的输入和输出,根据输入和输出通道的不同,交互的方式和组合也不同(见下图)。

图6:机器人交互的输入-输出
1. 输入
1)自身状态
- 硬件状态:检查传感器和执行器的状态,检查机器是处于开机、休眠、状态。
- 软件状态:检查软件是否开启是否处于运行状态,是否处于设置或者工程模式。
- 业务状态:检查当前机器(软件、硬件、算法)是否正在执行相关的业务。
2)外部环境
- 物理环境:检查机器周边的物理环境(周边物体、路面、障碍物…)。
- 网络环境:检查机器是否连接网络。
3)三方数据
合作方提供的数据:检查合作伙伴提供的数据是否可以正常接收,同时当前数据是否可以触发相应的交互。
4)历史数据
历史输出数据:根据既定的策略,判断当前历史数据是否会影响当前任务的进行或者新任务的触发。
5)当下操作
- 语音交互:语音指令、语音对话;输入当前的语音,判断是否会影响当前任务的进行或者新任务的触发。
- 手势交互:空间手势交互;识别当前手势,判断是否会影响当前任务的进行或者新任务的触发。
- 图像交互:屏幕上的软件操作;对机器人本体软件进行图像界面交互,判断是否会影响当前任务的进行或者新任务的触发。
2 输出
1)语音输出
- 在线语音:根据在线语音包(一般接入第三方)做出相应的反馈。
- 离线语音:根据已录制的离线语音包,和既定的语音回复策略,对当前机器人的状态进行相应的语音反馈。
2)运动输出
- 体位移动:通过电机驱动机器人在指定的方向上以一定的速度前行,包括前进、后退、左转、右转、变速、匀速、暂停、旋转等。
- 姿态调整:通过电机驱动机器人调整头部,手臂,摄像头等具备一定自由度的身体其他组成部位。
3)灯效输出
灯效变化:通过改变灯光的颜色、亮度、变换频率、变换方式、变换图案(灯组)对当前机器人的状态进行相应的反馈。
4)图像输出
表情状态:机器人主要通过屏幕表情、状态显示等方式以图像的形式对当前机器人的状态进行相应的反馈。
5)视觉输出
- 视觉锁定:主要对移动的物体或人体、人脸进行锁定跟踪时的反馈,对用户一般无感(或通过语音输出告知用户),工程师可以通过其他方式查看。
- 视觉丢失:主要对移动的物体或人体、人脸进行锁定跟踪时丢失目标的反馈,对用户一般无感(或通过语音输出告知用户)。
五、总结
机器人认识这个世界并与世界进行交互,主要分为感知、认知、决策、执行、记录(形成记忆)
- 感知:通过传感器收集周遭的数据,接触这个世界
- 认知:通过算法、既定的策略、活动记忆、知识图谱等方式来解读接触到的一切
- 决策:通过认识的结果,选择既定或学习到的执行方案
- 执行:根据执行方案调动全身的执行器进行方案的执行
- 记录:对整个过程进行记录,形成机器人“记忆”,辅助机器人升级(算法、策略、方案….)

图7:机器人交互逻辑
一个好的机器人交互方案需要考虑的因素实在是太多:
- 机器人交互的对象是谁?不同的对象给予怎样的反应?
- 发生交互的时间是早上、中午还是晚上?
- 在事件任务的进程的事前、事中、事后,应该给予怎样的反馈?
- 机器人在用户的左边、右边、后面、前面、远方、近处时,应该给予怎样的反应?
- 在机器人不同的反应中如何调动语音、肢体、移动、表情、灯效组成一个较好的体验?
即如下面的三维坐标,只是考虑了时间、空间、事件三个维度的组合,同一个触发因素可能导致27种组合的交互反馈,而且目前机器人也存在很大的局限性,机器人感知能力的提升也就意味着硬件成本的提升,算法模型质和量上的要求。
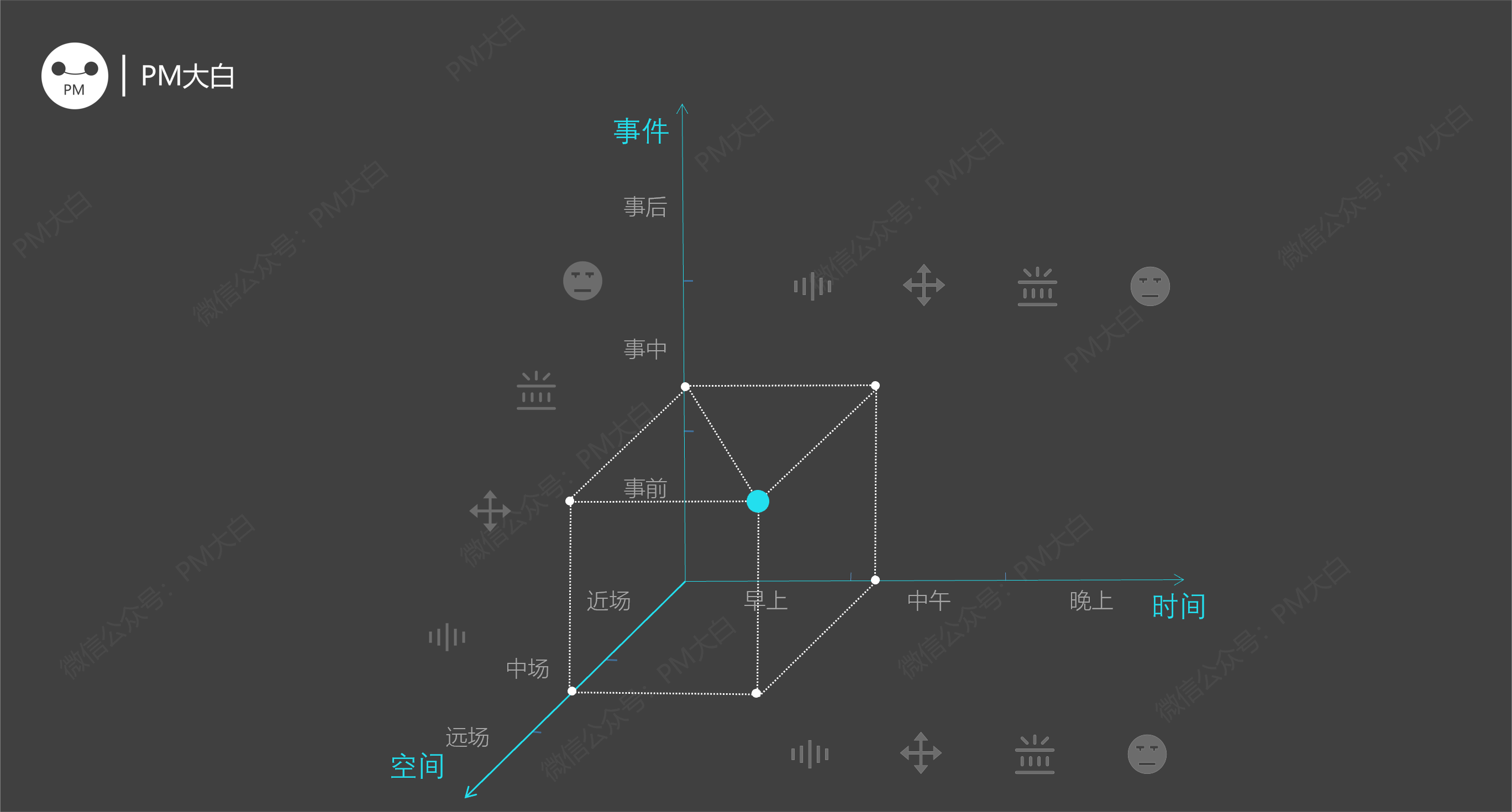
图8:机器人交互设计维度
当日首次唤醒问候:
时间:一天分三个时段
- 早上:早上好,又是元气满满的一天哦,主人
- 中午:中午好,我亲爱的主人
- 晚上:晚上好,我辛苦的主人,要听首《我的老父亲》放松发送吗?
事件:当天生日
- 事前:主人,生日快乐,大白祝您永远18岁,大白给您唱首歌吧~
- 事中:接着奏乐,接着舞,让我们大家一起祝主人永远18岁
- 事后:主人,今天生日开心吧,可是大白都没有吃生日蛋糕呢!
空间:分近场-中场-远场
- 近场:主人,今天是您的生日,大白为您唱首歌吧~
- 中场:主人,今天是您的生日,大白为您照张相吧!
- 远场:主人,今天可是您的生日哟,也不叫人家大白过来为您服务呀~
专栏作家
andy,微信公众号:PM大白,一名产品经理行业的小兽医经理行业的小兽医
本文原创发布于人人都是产品经理。未经许可,禁止转载
题图来自 Pixabay,基于 CC0 协议
该文观点仅代表作者本人,人人都是产品经理平台仅提供信息存储空间服务。
来源:https://www.woshipm.com/ucd/5634136.html
本站部分图文来源于网络,如有侵权请联系删除。